Robotic arm
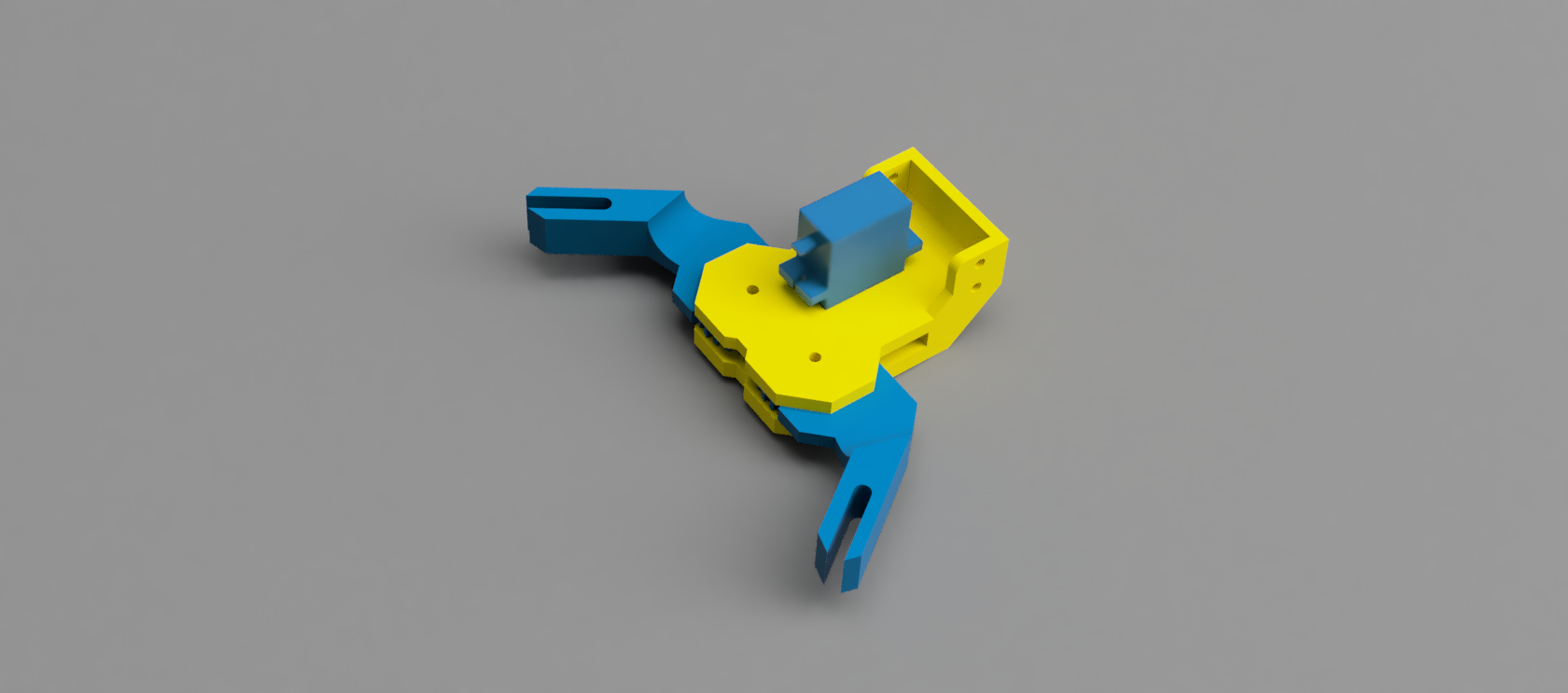
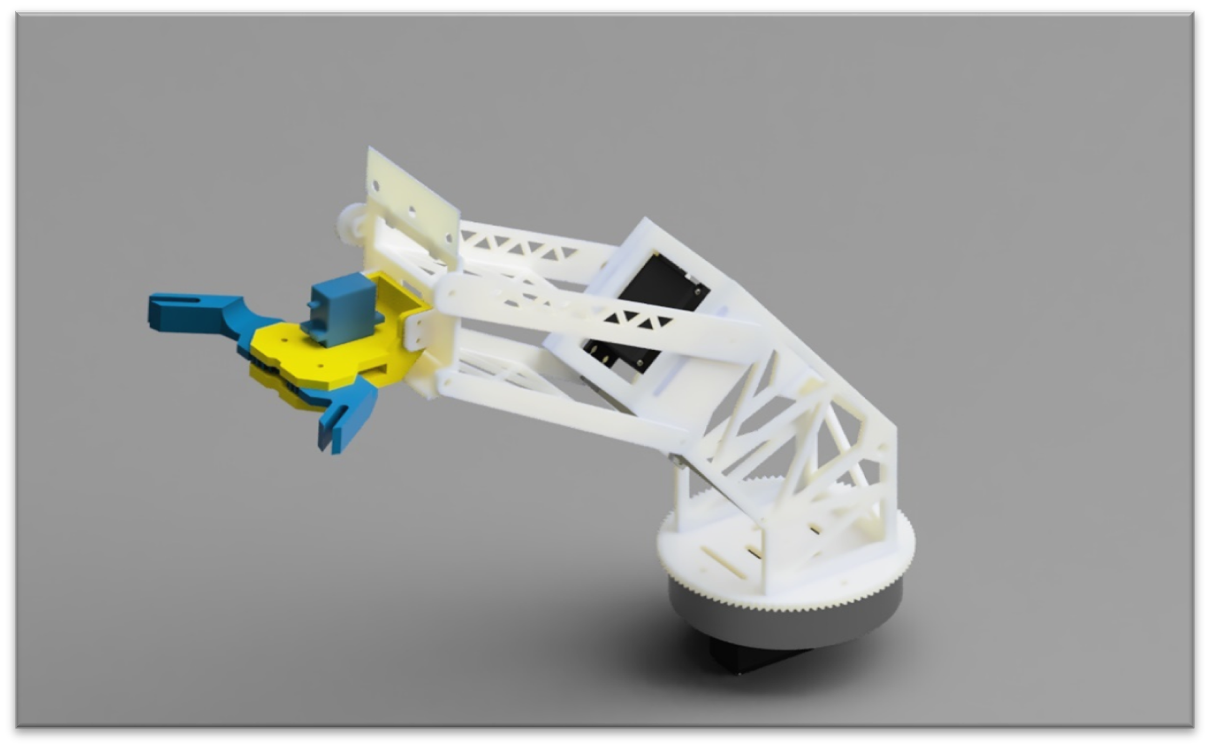
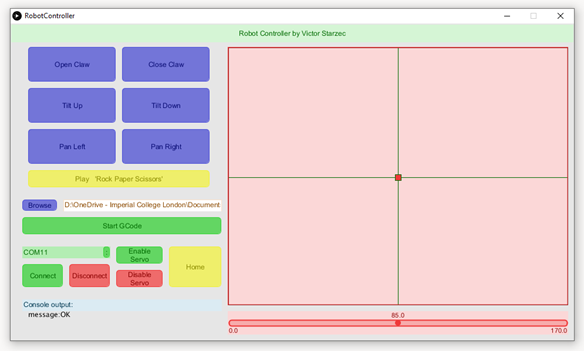
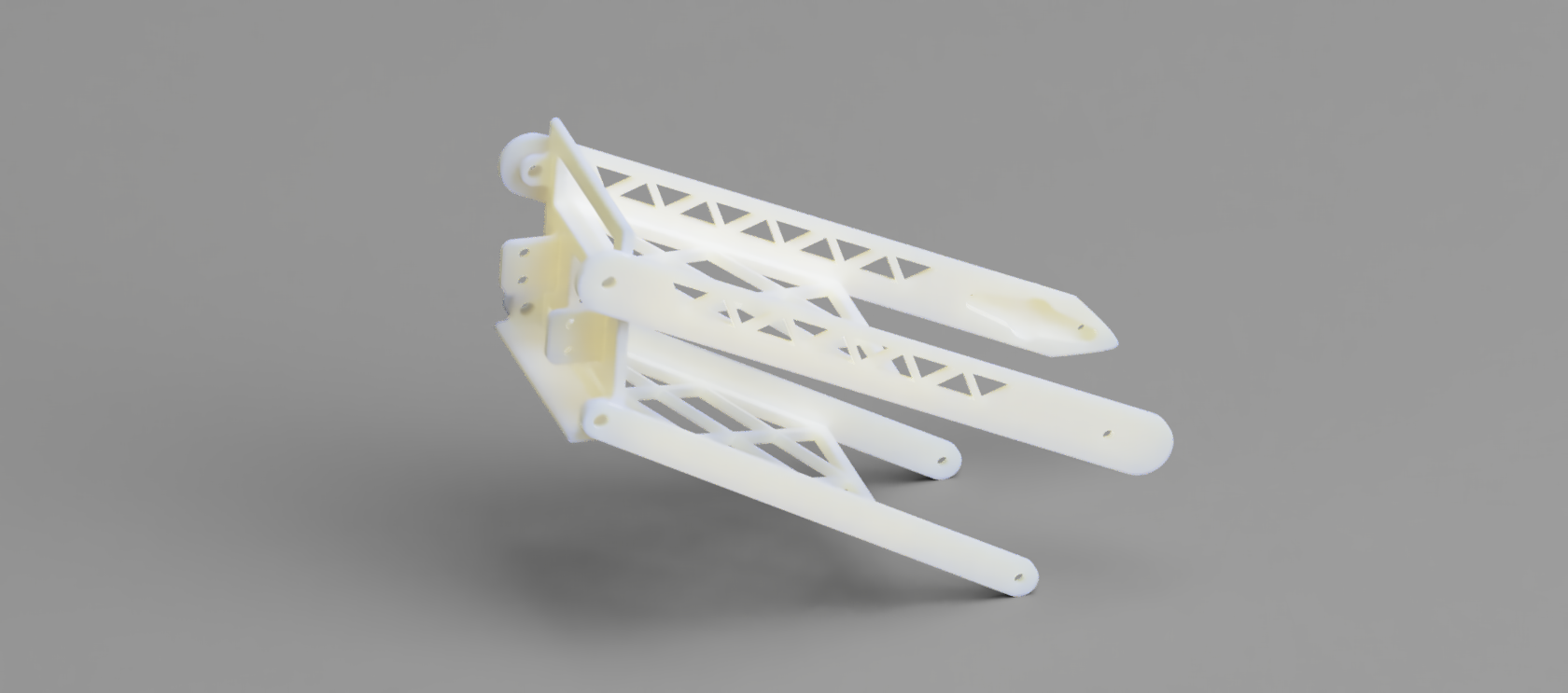
The challenge presented was to create a robotic arm, capable of picking up a ball of paper, or paper gyrocopter, based on a user input. The arm but also be capable of representing other outputs to the user such as a signal for rock, paper or scissors to be able to play games. Part of the project was collaborative so ideas were taken from other team members and developed in order to create the most effective and efficient design.
For more details, get in touch.